43 KiB
🧭 不知道要從哪裡開始?先打開 WFGY Engine Compass
WFGY 系統地圖 · 快速導航
Problem Maps:PM1 問題分類 → PM2 偵錯協議 → PM3 故障排查 Atlas,底層建立在 WFGY engine 系列之上
| 層級 | 頁面 | 這頁是幹嘛的 |
|---|---|---|
| ⭐ 證據 | WFGY Recognition Map | 看外部引用、整合情況和整個生態的證據 |
| ⚙️ 引擎 | WFGY 1.0 | 最早的 PDF 張力引擎,以及早期邏輯草圖 |
| ⚙️ 引擎 | WFGY 2.0 | 用在 RAG 和 agent 系統上的正式生產級張力核心 |
| ⚙️ 引擎 | WFGY 3.0 | 以 TXT 為基礎的 Singularity 張力引擎(131 個 S-class 問題集合) |
| 🗺️ 地圖 | Problem Map 1.0 | 旗艦級的 16 類 RAG 故障分類與修復地圖 |
| 🗺️ 地圖 | Problem Map 2.0 | 用來診斷 RAG 和 agent pipeline 的 Global Debug Card |
| 🗺️ 地圖 | Problem Map 3.0 | Global AI 故障排查 atlas 與故障模式地圖,🔴 你現在就在這裡 🔴 |
| 🧰 應用 | TXT OS | 一套可在 60 秒啟動的 .txt 語意作業系統 |
| 🧰 應用 | Blah Blah Blah | 建立在 TXT OS 之上的抽象問答與悖論問答系統 |
| 🧰 應用 | Blur Blur Blur | 有語意控制能力的文生圖系統 |
| 🏡 入門 | Starter Village | 給新手用的引導式入口 |
Problem Map 3.0:AI 故障排查地圖集
一套給 vibe coder 和用 AI 做系統的人使用的故障路由器
TXT 載一次,照常開發,讓 AI 在偵錯時更常從對的層開始下刀。
註:目前中文化先只翻這一頁。下面連出去的其他頁面,暫時仍以原始內容為主。
有人說 AI時代寫程式像 2050 年,但 debug 還停在 1999 年。
打造東西越來越簡單,但 AI 還是很常把錯的修法講得像真的一樣。
第一刀如果切錯層,整條 debug 流程就會開始歪掉,就像一開始先掛錯科。
Problem Map 3.0 Troubleshooting Atlas 想做的事,就是讓 AI 在錯誤越滾越大之前,先切對第一刀。
從這裡開始,60 秒上手
你不需要很深的 RAG 背景也能開始。這套東西是做給 vibe coder、AI app 開發者、workflow / agent builder,還有正在 debug 高 AI 密度系統的工程師用的。
TXT 裝一次,照常開發,讓 AI 在 debug 時更常從對的層開始。
| 步驟 | 你要做的事 |
|---|---|
| 1 | 下載 Router TXT Pack |
| 2 | 把它丟進 ChatGPT、Claude、Gemini、Cursor、Copilot,或你平常在用的 AI workflow |
| 3 | 照常繼續開發 |
| 4 | 讓 AI 在 debug 時做出更好的第一刀 |
遇到比較硬的案例時,之後還是可以補 logs、traces、輸出結果,或失敗範例,讓 routing 更準。
快速導航 · 選你要走的入口
不知道從哪裡開始?先從 Router TXT Pack 開始就對了。其他東西之後再看都可以。
| 你現在想做什麼 | 看這裡 | 等級 |
|---|---|---|
| 先拿 TXT Router 直接試 | Router TXT Pack | 🟢 入門 |
| 看最快怎麼開始用 | Router 使用指南 | 🟢 入門 |
| 直接看常見問題 | 前往 FAQ | 🟢 入門 |
| 想跟社群討論,或直接提問 | 💬 加入我們的 Discord | 🟢 入門 |
| 看 routing 怎麼改變第一個修復動作 | 官方旗艦示範 | 🟡 開發者 |
| 看 routing 之後可以怎麼修 | Fixes Hub 修復中心 | 🟡 開發者 |
| 看完整的 Atlas 結構和文件 | Atlas Hub | 🟠 進階 |
| 支持這個專案 | ⭐ 替 WFGY repo 點星 | ⭐ |
為什麼這套東西不太一樣
大多數 AI 偵錯都死得很早,原因通常就是第一刀切錯。
- 看起來像 hallucination,起點其實可能是 grounding 漂移
- 看起來像 reasoning collapse,起點其實可能是 formal container 壞掉
- 看起來像 safety 或 memory 問題,起點其實可能是 observability 不夠,或 execution closure 失敗
第一個診斷如果錯了,第一個修法通常也會跟著錯。
一個快速的前後對比
如果第一個除錯方向更常是正確的,會發生什麼變化?
下面這張圖是一個可重現、由 AI 評估的前後對比估計,用來展示 Atlas 嘗試帶來的操作層面變化。

這不是正式的 benchmark。
它只是用來說明一個更簡單的主張:
更準確的第一刀 routing,可以減少隱性的除錯浪費
更多截圖、重現方式,以及目前仍在整理中的證據頁面,請見:
AI Eval Evidence
你現在立刻能拿到什麼
| 層級 | 你現在就能拿到什麼 |
|---|---|
| Router TXT | 一個今天就能丟進 AI workflow 裡用的精簡 routing pack |
| Usage Guide | 如果你想幾分鐘內就測起來,這是最短的入口 |
| Official Demos | 直接證明不同 routing 會導出不同第一修復動作的具體示範 |
| Fixes Hub | 路由選定之後,面向修復的那一層 |
| Atlas Hub | 更深的地圖、casebook、adapter、patch note 和 bridge 材料 |
| Recognition Map | 證明較早期的 WFGY ProblemMap 系列,已經在真實專案中被使用或引用的外部證據 |
Recognition 與生態整合
截至 2026 年 03 月,WFGY RAG 16 Problem Map 這條系列, 已經被 30 個以上的框架、學術實驗室和精選清單 採用或引用。 大多數外部引用,都是把 WFGY ProblemMap 當成 RAG / agent pipeline 的診斷層來用。 這些引用主要對應到 WFGY Series 的較早期版本, 尤其是 RAG 16 Problem Map 這條主線, 不應該直接解讀成已採用較新的 Troubleshooting Atlas(Problem Map 3.0) 層。
一些代表性的整合如下:
| 專案 | Stars | 類別 | 它怎麼使用 WFGY ProblemMap | 證據(PR / 文件) |
|---|---|---|---|---|
| LlamaIndex |  |
主流 RAG 基礎設施 | 把 WFGY 的 16 類 RAG 故障清單整合進官方 RAG troubleshooting 文件,當成結構化故障模式參考。 | PR #20760 |
| RAGFlow |  |
主流 RAG 引擎 | 透過 PR,把一份 RAG 故障模式清單指南放進 RAGFlow 文件,內容改編自 WFGY 的 16 類故障地圖,用來做逐步的 RAG pipeline 診斷。 | PR #13204 |
| FlashRAG (RUC NLPIR Lab) |  |
學術實驗室 / RAG 研究工具 | 在文件中把 WFGY ProblemMap 改寫成結構化的 RAG 故障清單。這套 16 模式分類被用來支撐可重現偵錯,以及 RAG 實驗中的系統化故障模式推理。 | PR #224 |
| DeepAgent (RUC NLPIR Lab) |  |
學術實驗室 / agent 研究 | 新增一份受 WFGY 式偵錯概念啟發的 多工具 agent 故障模式 troubleshooting note,用來診斷 agent pipeline 裡的工具選擇循環、工具誤用和多工具 workflow 失敗。 | PR #15 |
| ToolUniverse (Harvard MIMS Lab) |  |
學術實驗室 / 工具 | 提供一個 WFGY_triage_llm_rag_failure 工具,把 16 模式地圖包成事故分流工具。 |
PR #75 |
| Rankify (University of Innsbruck) |  |
學術實驗室 / 系統 | 在 RAG 和 reranking troubleshooting 文件中使用這 16 類故障模式。 | PR #76 |
| Multimodal RAG Survey (QCRI LLM Lab) |  |
學術實驗室 / survey | 把 WFGY 當成多模態 RAG 的實用診斷資源來引用。 | PR #4 |
| LightAgent |  |
Agent 框架 | 透過 Multi-agent troubleshooting(failure map) 區塊,把 WFGY ProblemMap 概念納入文件,提供一套結構化的症狀 → 故障模式 → 偵錯清單,用來診斷多 agent 系統中的角色漂移、跨 agent 記憶問題和協作失敗。 | PR #24 |
完整的 30+ 專案列表(框架、benchmark、精選清單),請看 👉 WFGY Recognition Map
如果你的專案有使用 WFGY ProblemMap,而且你也想被列進來, 歡迎在這個 repo 開 issue 或 pull request。
這套系統實際上在做什麼
Problem Map 3.0 不只是替故障命名而已。
它會幫人和 AI 系統,更穩地做到五件事:
- 先把故障分對類
- 找出到底是哪個 invariant 壞掉了
- 把那些很容易搞混的相鄰故障區切開
- 選出正確的第一修復方向
- 避免後面的 debug 直接崩成臨場亂猜
所以這個專案比較準確的理解方式,不只是 checklist。
它其實是一套 偵錯決策系統。
在複雜的 AI 偵錯裡,最大成本往往不是最後答案本身。
而是 第一個錯誤的修復動作。
核心承諾
你可以用一句話理解這個專案:
一套幫人和 AI 在複雜偵錯一開始,就不要走進錯誤修復路徑的系統
它不只回答:
- 問題出在哪裡
- 還會指出故障是落在哪一層
- 哪個相鄰區域看起來很像,但其實切過去是錯的
- 應該先修什麼
- 不應該先修什麼
Atlas 怎麼替故障做 routing
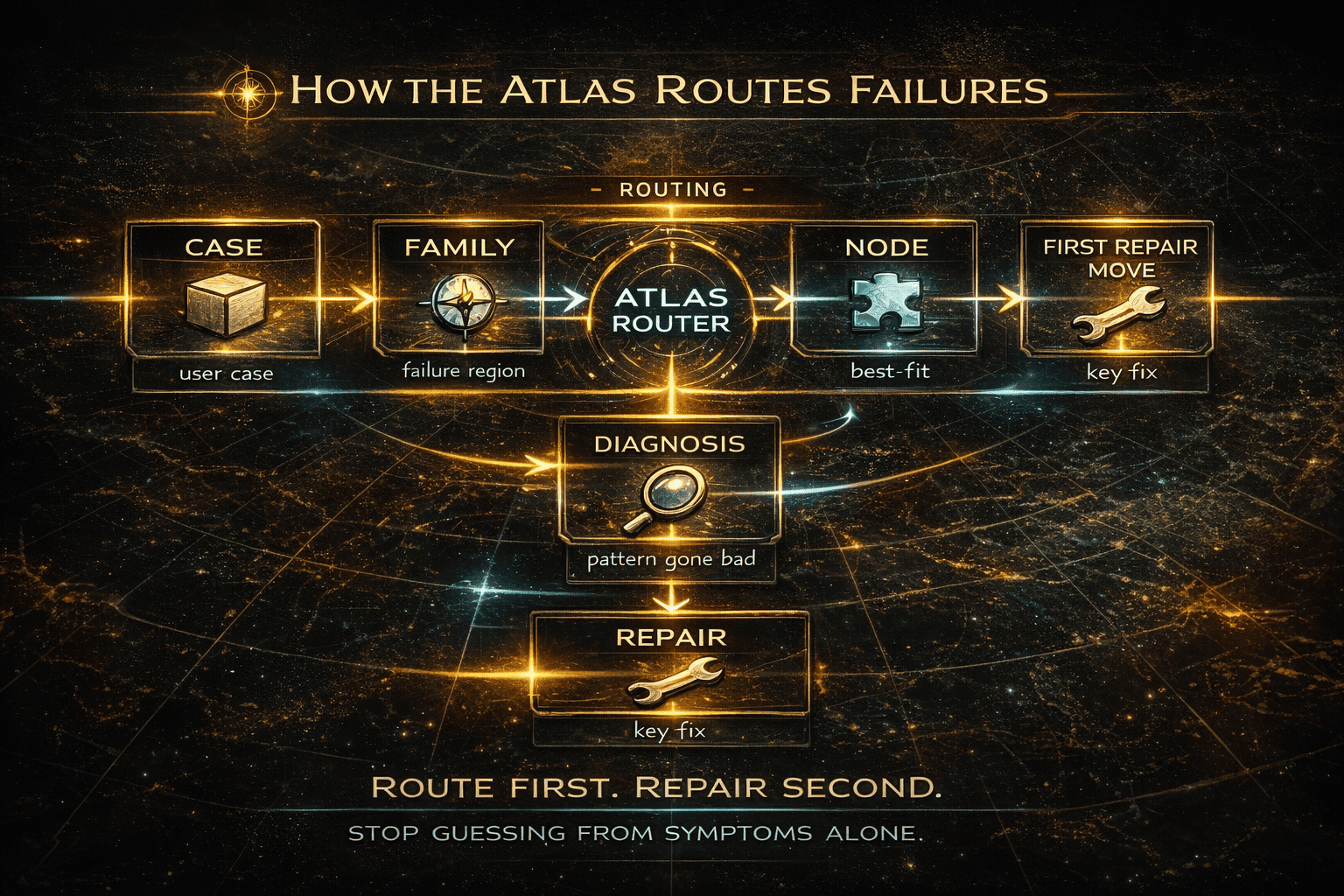
先路由,再修復。不要只看症狀亂猜。
這是給誰用的
這一頁設計成不同深度的使用者都能用得上。
如果你是 vibe coder
用 TXT,繼續開發,讓 AI 在 debug 時做出更好的第一刀。
如果你在做 AI app 或 workflow
用 atlas 去減少 prompt chain、tool flow、agent 和 stateful system 裡那種「第一步就修錯」的情況。
如果你是工程師
把它當成一套路由語法、故障地圖,還有「先修對的層」的紀律。
如果你想看得更深
就去看 Atlas Hub、casebook、adapter、bridge pack、demos 和 fixes layer。
你不需要很深的 RAG 專業背景也能開始。
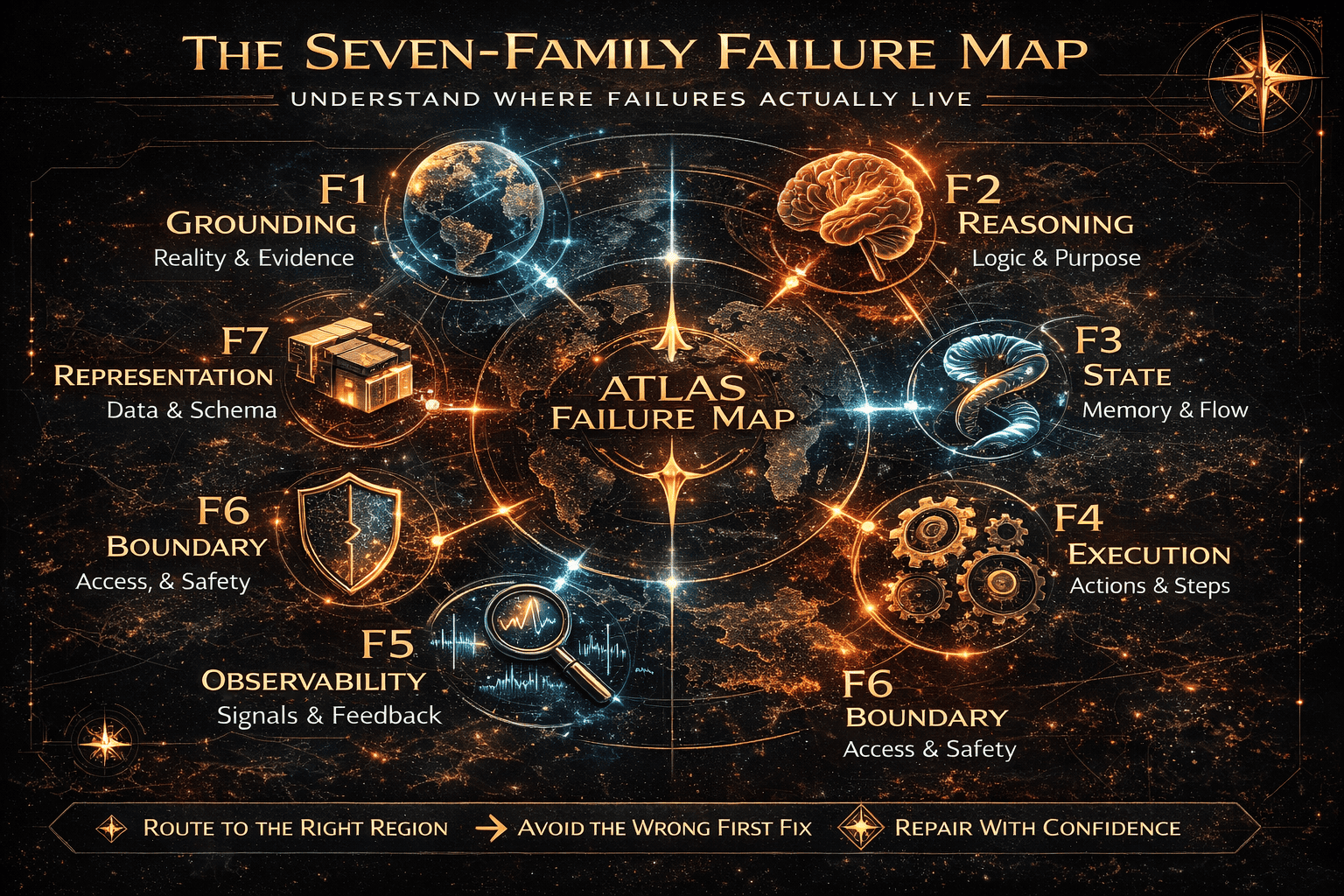
七大家族故障地圖
產品堆疊
Problem Map 3.0 不是單一頁面。
它是一套分層系統。
Atlas
整個故障空間的地圖。
Router
幫 AI 系統先做故障 routing 的精簡可執行入口。
Casebook
教你關鍵切法應該怎麼下的教學層。
Fixes
當路由確定之後,面向修復的那一層。
Demos
用來證明不同 routing 真的會導出不同第一修復動作的證據層。
簡短版:
Atlas = 地圖
Router = 快速入口
Casebook = 教學層
Fixes = 第一修復介面
Demos = 證據
直接把 atlas 丟給 AI 用
Problem Map 3.0 不只是一套文件系統。
它也包含一個精簡、面向產品的 routing pack:
Troubleshooting Atlas Router v1
這是第一個從 atlas 長出來的精簡 TXT 路由包。
它要做的事很單純:
- 先替案例做 routing
- 找出壞掉的 invariant
- 分出最強的相鄰壓力
- 建議第一修復方向
- 警告可能的錯修
- 當證據不足時保持誠實
簡短版:
Atlas 是地圖。
Router 是這張地圖第一個精簡、可執行的介面。
如果你想看實用入口:
Router 不是什麼:
- 不是完整 Atlas
- 不是完整 Casebook
- 不是完整自動修復引擎
- 不是宣稱已經完成完整診斷閉包的東西
它真正提供的,是一個更直接也更實用的能力:
把 TXT 丟進 AI 系統裡,讓它在錯誤修法開始一路連鎖放大之前,先切出更好的第一刀
從 routing 走到 repair
Problem Map 3.0 不只停在診斷。
它打開了一條從 routing 走到第一修復的受控路徑。
Atlas layer
atlas 先幫故障做 routing。
Casebook layer
casebook 教你主要切法應該怎麼切,也教你相鄰區域應該怎麼分開。
Fix layer
fix surface 會把正確的 routing,轉成更有紀律的第一修復動作。
更深層的 bridge layer
當案例需要更強的結構性介入時,WFGY 仍然是更深層的探索引擎。
這代表這套系統不是只有:
- 分類完就停
而是:
- 先路由
- 正確切開
- 先修對的那一層
- 真的有需要時,再往更深層升級
這東西真的可用,不只是理論
現在這套系統,已經跨過「這想法很有趣」那條線,進到「這東西真的能拿來做故障排查」的階段了。
目前最強的公開證據其實很簡單:
不同的 routing,會導出不同的第一修復動作
而這正是官方 demos 要展示的核心。
第一批 demo pack 聚焦在四個很銳利的家族:
- F1 grounding-first
- F5 observability-first
- F4 execution-first
- F7 container-first
之所以先挑這四個,是因為它們最能快速證明 atlas 不只是替故障貼標籤。
它真的會改變接下來該怎麼做。
請看:
為什麼這東西會存在
現在的 AI 系統越來越常長成這樣:
- retrieval-heavy
- 多步驟
- 會用工具
- stateful
- agentic
- operational
系統一旦長成這樣,只靠症狀詞去描述就會太粗:
- 幻覺
- prompt 問題
- retrieval 不好
- 推理不好
- 記憶問題
- alignment 問題
這些標籤不是完全沒用,但通常都太淺,淺到你根本沒辦法決定「到底要先修哪裡」。
Problem Map 3.0 Troubleshooting Atlas 做出來,就是要把這些區域切得更乾淨,讓診斷更穩,第一修復動作也更準。
為什麼現在特別重要
AI 系統正變得更分層、更 stateful、更 agentic,也更 operational。
系統一旦長成這樣,如果每種錯誤都只被壓成這幾個標籤,debug 很快就會失效:
- 幻覺
- prompt 問題
- 模型限制
- alignment 問題
- retrieval 不好
- 推理不好
這些標籤太粗了。
團隊會越來越需要一套可重複使用的語法,可以講出:
- 這是 grounding-first,不是 reasoning-first
- 這是 container-first,不是 semantics-first
- 這是 observability-first,不是 boundary-first
- 這是 execution-first,不是 continuity-first
這就是這套 atlas 的實際價值。
V1 狀態與迭代政策
這是 Troubleshooting Atlas 第一個公開的 V1 版本。
它已經經過壓力測試,但還在長。
這代表:
- 核心結構已經可用
- Router 已經可用
- demo 路線已經可用
- 邊界案例還是存在
- 未來更強的版本是可以預期的
如果你發現:
- 缺口
- 邊界案例
- routing 錯誤
- 看起來很卡的頁面流
- 某個應該存在但還沒出現的 demo
請直接開 issue。
目標不是做一座不能動的紀念碑。
目標是讓這個偵錯介面隨時間越來越銳利。
更大的方向
Problem Map 3.0 現在先被建成一套很強的 AI 故障排查 atlas。
這是最實用的入口。
但同時,它的長程方向其實更大。
同一套 family grammar,看起來是有能力吸收更多一般性的故障,包含:
- 協作
- 制度
- 一致性
- 集體壓力
- 結構性崩壞
比較正確的理解方式是:
AI Troubleshooting Atlas 是第一個已被驗證的 operational surface。
更廣義的複雜系統 bridge 是下一步,不是行銷口號。
這個區分很重要,而且是故意保留的。
這一頁沒有宣稱什麼
這一頁沒有宣稱:
- 所有可能的故障都已經收完了
- 所有子樹都已經展開完成
- 所有關係都已經列完
- 所有未來的跨領域問題都已經被這張地圖解掉
- 不再需要 patch
- 最終文明級 atlas 已經完成
更安全、也更準確的說法是:
第一個正式 atlas 版本,已經完整到足以產生意義,
接下來的工作應該透過 patch、加厚、適配和擴展示範,持續往前推
FAQ
1. 入門開始
新使用者該從哪裡開始?
這要看你是哪一種使用者。
如果你想走最快、最實用的入口
從這裡開始:
如果你想先看產品總覽
先看這一頁,接著再去:
如果你想看核心結構
請前往:
如果你想看範例和教學案例
請前往:
如果你想看修復導向材料
請前往:
如果你想看 demos
請前往:
我要用這套東西,需要很深的 RAG 知識嗎?
不需要。
這也是為什麼 Router TXT 和 Usage Guide 會存在。
如果你是用 AI 來開發,也用 AI 來 debug,那你可以直接從這裡開始:
更深的 Atlas,是給那些想要更多結構、更多案例、更多理論,還有更多延伸層的人使用的。
Troubleshooting Atlas Router 實際上在做什麼?
Router 是從 Atlas 長出來的第一個精簡 TXT routing pack。
它的工作,是幫 AI 系統照順序做到下面這些事:
- 找出最可能的主要 family
- 如果相鄰 family 的壓力是真的存在,找出最強的那個
- 說清楚為什麼主要切法比較強
- 找出壞掉的 invariant
- 提出第一修復方向
- 警告可能的錯修
- 對信心和證據是否足夠保持誠實
最好的理解方式是:
Atlas 的第一個精簡可執行介面
它不是完整 Atlas,也不是完整修復引擎。
Problem Map 1.0、2.0 和 3.0 差在哪裡?
Problem Map 1.0 是標準的 16 類 RAG 故障分類與修復地圖。
Problem Map 2.0 是 Global Debug Card 這一層。
它把偵錯物件、指標、ΔS 區域和運作模式,壓成一套視覺協議。Problem Map 3.0 是更廣義的故障排查 atlas。
它從平面的故障命名,進一步走到路由語法、family 結構、邊界規則、案例教學、修復導向,還有更廣的 bridge 工作。簡短版就是:
- 1.0 給你基礎故障詞彙
- 2.0 給你壓縮後的視覺偵錯協議
- 3.0 給你更完整的故障排查 atlas 和 routing 系統
2. 為什麼這很重要
這會讓 AI 更接近自動偵錯或自動修 bug 嗎?
會,而且是以一種重要但有限的方式。
Problem Map 3.0 沒有宣稱完整自主偵錯或完整自主修 bug 已經來了。
它真正宣稱的範圍比較窄,但也更實用:
- 它幫助人和 AI 系統更正確地替故障做 routing
- 它幫助更清楚地找出壞掉的 invariant
- 它幫助選出更好的第一修復方向
- 它幫助提早警告可能的錯修
這很重要,因為很多 debug 失敗,其實都不是死在最後一步,而是死在第一個錯誤動作。
如果 AI 系統更擅長切出第一道診斷邊界,能避開那些看起來很像、但其實是錯的相鄰區域,並且在證據和信心上保持誠實,那更可靠的自動偵錯就會開始變得更可行。
所以比較正確的理解方式是:
這套系統沒有宣稱完整自主修復已經被解完
但它確實把 AI 偵錯往「自動修復更可能成立」的方向再往前推了一步
如果 AI 寫程式變快了,為什麼偵錯還是常常壞掉?
因為寫碼變快,不會自動等於故障診斷變好。
AI 的確常常可以把局部 coding 工作加速很多。
但真實系統出問題的地方,通常還是在更高層:
- 整合
- 順序
- 延續性
- 契約
- 可見性
- 狀態交接
- 部署行為
- 第一個診斷就切錯
在很多真實 workflow 裡,瓶頸早就不是「能不能快速生出程式碼」。
真正的瓶頸會變成:
- 能不能先把故障路由對
- 能不能提早看出壞掉的 invariant
- 能不能避開錯的修復區域
- 當證據很薄時,信心能不能不要亂飆
這也正是 troubleshooting atlas 會開始變得有用的地方。
所以 atlas 不應該被理解成「另一個 code generator」。
它比較像是 AI 優先偵錯時代的路由語法。那個時代裡,生成很快,但診斷還是很容易歪掉。
它實際上能省下多少偵錯時間?
這取決於系統本身和故障型態,所以這套 atlas 不會宣稱一個放諸四海皆準的固定數字。
它的價值,最明顯會出現在那種主要成本來自「一開始就走錯診斷區」的複雜系統。
在這種情況下,像 Problem Map 3.0 這種先 routing 的系統,在很多案例裡,很有可能把被浪費掉的偵錯時間降低大約 30 到 50 percent。
這個估計要小心理解。
它不是在說每一個 bug 都會快 30 到 50 percent 修好。
它的意思是,很多團隊會把大量時間浪費在:
- 第一刀切錯
- 錯修
- 追錯相鄰但其實不對的故障區
- 太晚才發現壞掉的 invariant
- 在結構可見性不夠的情況下硬 debug
這套 atlas 的設計,就是要減少這一類浪費。
所以比較安全的理解方式是:
它不承諾每個環境都有固定 benchmark 數字
但在複雜、多步驟、容易故障的系統裡,它可以實質降低因早期誤診而浪費掉的時間
它能幫助 blind benchmark 或 hidden-task 這類場景嗎?
可以,特別是當 benchmark 裡有誤導性的表面訊號、資訊不完整,或同時存在多個看起來都很合理的故障區域時。
在這些場景裡,問題通常不只是「模型能不能把任務解出來」。
問題還會包含:
- 模型能不能先辨認自己現在遇到的是哪一類故障或任務
- 它能不能不要被拉進錯的相鄰區域
- 在不確定的情況下,它能不能做出更正確的第一個診斷動作
這正是路由語法能派上用場的地方。
Problem Map 3.0 不會神奇地把隱藏答案變出來。
但它可以降低太早走進錯誤搜尋區域的機率。這讓它特別適合:
- blind issue triage
- hidden-task 場景
- 很容易誤導人的 benchmark prompts
- agentic repair benchmarks
- 真實世界裡那種症狀沒辦法直接揭露真實故障家族的 debug 場景
所以比較安全的理解方式是:
這套 atlas 不會取代解題本身
但在第一輪分類一旦錯掉就代價很高的場景裡,它能改善任務定型、早期 routing 和第一步紀律
3. 為什麼值得相信
你怎麼知道這個 atlas 不是隨便編出來的分類系統?
因為它不是先把分類名字取好,再把案例硬塞進去。
現在這個 mother structure,是在反覆承受 routing 壓力、邊界壓力和跨領域壓力之後測出來的。
它主要來自兩個大壓力源:
- 較早期的 Problem Map 1.0,它已經在真實 AI 和 RAG 偵錯裡證明過有用
- 更深層的 WFGY 3.0 壓力測試面,包含對 131 個 S-class 問題的反覆壓測
到目前為止,真正重要的結果,不是所有未來子樹都已經補完。
真正重要的是:
- 最上層 mother structure 一直維持穩定
- 沒有明確冒出第八家族壓力
- 在已測案例下,主要 family 邊界沒有崩掉
- 後續工作大多落在子樹細化、node carving、關係細化,還有有紀律的 patch 迭代
所以這裡的宣稱不是 atlas 在每個細節上都已經定案。
真正的宣稱是:主路由語法已經穩定到可以 freeze,未來工作應該透過有紀律的 patch 持續細化,而不是整張地圖重畫。
這個 atlas 結構到底是怎麼長出來的?
它不是先想出七個 family 的名字,再把案例硬塞回去。
它的推導是分層進行的。
第一層,較早期的 Problem Map 1.0,是透過 WFGY 1.0 的底層邏輯雕出來的。
那是最早的實用故障表面。第二層,WFGY 2.0 加上了更強的數值和 operational constraint layer。
這讓系統在解讀故障、routing 張力和結構不穩定時,變得更有紀律。第三層,一個尚未公開、更深的 Tension Universe 推理層,被拿來把較早期的故障表面,抬升成更廣的 mother structure,而不是讓它只停在平面 checklist。
最後,再用 WFGY 3.0 去對這個 mother structure 的邊界,在更難、更廣的壓力案例下做測試。
這也是為什麼現在這個 atlas 被打磨成的是路由語法,而不是單純命名表。簡短版就是:
- WFGY 1.0 幫忙雕出最早的 RAG 故障結構
- WFGY 2.0 加上更強的結構和數值紀律
- 一個更深但尚未公開的推理層,把它抬升成 mother framework
- WFGY 3.0 再把邊界壓測成現在這個 atlas
所以這個 atlas 不應該被看成任意分類法。
它比較像是一個在壓力下成形,從早期已驗證的故障地圖一路長出來的框架。
為什麼是七大家族,不是更多,也不是更少?
因為七大家族這個 mother structure,不是先選一個喜歡的數字。
它是被壓力雕出來的。
重點不是「七聽起來很漂亮」。 真正重要的是,在目前已測的覆蓋範圍下:
- 最上層家族仍然清楚可讀
- 主要邊界切法仍然穩定
- 細化壓力主要落在子樹和 node 結構
- 還沒有明確的第八家族壓力,逼到 mother table 必須重畫
所以 atlas 並不是在宣稱七是某種永恆神祕的終極數字。
它真正的宣稱比較窄,但更強:
到目前為止,七是最小而且穩定的 mother structure,並且在測試壓力下活了下來,沒有出現明顯的頂層崩壞
什麼情況會真正推翻,或嚴重挑戰這個 atlas?
atlas 不是設計成不可證偽的東西。
下面幾種情況,都會構成嚴重挑戰訊號:
- 一個反覆出現,而且無法誠實被目前家族吸收的明確 no-fit zone
- 多個高難案例裡持續出現第八家族壓力
- 主要邊界規則反覆崩掉
- 證據顯示頂層 routing 不是局部失敗,而是系統性失效
這和一般細化不一樣。
正常的子樹加厚、node carving、關係細化和 patch 更新,不算 mother structure 被推翻。
所以正確標準是:
局部細化壓力本來就會出現
真正的挑戰,是頂層結構失敗
這不就只是把大家原本就懂的偵錯常識重新貼標籤而已嗎?
不是。
好的工程師本來就多少都有一種直覺,知道「不要先修錯地方」。
atlas 的重點,不是在宣稱人類以前完全沒有這種偵錯智慧。
它真正要做的,是把這種直覺變成一套可重用的路由語法,而且結構是明確的:
- family 邊界
- 壞掉的 invariant
- 為什麼主切法比次切法更合理
- 錯修警告
- 信心紀律
- 證據充分性紀律
這很重要,因為非正式直覺很難重用、很難教,也很難讓 AI 系統穩定照做。
所以這不是「把常識換成比較花的詞」。
它是在試著把故障路由變得更明確、更可重複、更可教,也更容易被 AI 讀懂。
如果不同模型對同一個案例給出不同 routing,怎麼辦?
這種情況會發生,尤其是當證據不完整,或案例本來就卡在真實邊界附近的時候。
atlas 並不假設每個模型都一定會講出一模一樣的字,或有完全相同的局部重點。
它真正想強迫出來的,是更重要的東西:
- 一個站得住腳的主要切法
- 一個明確列出的相鄰替代路徑
- 一個對壞掉 invariant 的清楚主張
- 可見的信心紀律和證據紀律
換句話說,分歧不會自動等於失敗。
真正要問的是,這些競爭中的 routing 在結構上站不站得住腳,以及這種分歧能不能透過更好的邊界推理或更好的證據被縮小。
所以目標不是讓所有模型都講出完全相同的句子。
目標是讓結構性 routing 在壓力下更穩。
4. 範圍、限制,還有接下來怎麼走
這套系統現在已經能自動修好所有東西了嗎?
還沒有。
目前公開版本最強的地方在於:
- 先 routing 的分類
- 有邊界意識的診斷
- 讀出壞掉的 invariant
- 第一修復方向
- 錯修警告
- 有需要時可往更深層升級的路徑
這本身就已經很有價值。
但這不等於下面這些事情已經成立:
- 完整自主診斷
- 完整自主修復
- 每個案例都能做到完整 root-cause closure
目前的修復邏輯,最好的理解方式是:
先路由,先選對第一步,真的有需要時再往更深層升級
為什麼不直接用更好的 prompts、tests,或 observability tools 就好?
因為那些工具和這個 atlas 做的事情不一樣。
更好的 prompts、更好的 tests、logging、tracing 和 observability tools 當然都很有用。
但它們不會自動回答這個 routing 問題:
- 這到底是哪一類故障
- 哪個相鄰區域看起來很誘人,但其實是錯的
- 最可能先壞掉的是哪個 invariant
- 到底該先檢查哪裡,先修哪裡
atlas 不是要取代 tests 或 observability。
它的角色,是站在它們上面當一層 routing layer,幫人和 AI 系統先決定要看哪裡,還有怎麼避免把時間浪費在錯的區域。
什麼時候這個 atlas 會太重,甚至根本沒必要?
它不是拿來處理每一個小錯誤的。
如果問題只是簡單 typo、單純語法錯,或一眼就知道只要修一行,而且局部原因也很清楚,那完整 routing layer 可能根本沒必要。
atlas 最有價值的時候,是案例有下面一項或多項特徵:
- 同時有多個合理故障區域
- 有隱藏契約或隱藏狀態
- 多步驟 workflow
- 跨模組互動
- observability 很差
- 錯修風險高
- 第一刀反覆切錯
所以比較正確的理解方式是:
它不是拿來把小 bug 戲劇化的工具
它是拿來降低複雜故障空間中錯誤搜尋和錯誤修復的工具
這只是 atlas 的第一代嗎?
是。
目前公開版本,應該被理解成 atlas 的 第一個正式世代。
它目前最強、也最被驗證的公開形態,是刻意做成 AI 優先。
原因是 AI troubleshooting 是這個 mother framework 第一個已經被雕得夠深,可以 freeze 的 operational surface。但同時,七大家族語法並不是被雕成只適用於 AI 的狹窄主題表。 它是作為一套更廣義的複雜系統故障語法被雕出來的。
這也是為什麼這個專案已經包含了受控的 AI 之外 bridge 工作,而且未來可以擴到:
- 更多應用介面
- 更多 casebook 層
- 更多修復導向材料
- 更多 adapter 層
- 更廣的跨領域 bridge 工作
- 最後走向更完整的文明級偵錯框架
所以比較正確的理解方式是:
這是第一代
mother structure 已經穩定了
未來擴的是應用,不是把核心從頭重做如果你想追這些擴展、未來的 bridge 工作和新的應用層,可以持續關注專案更新和社群頻道。
這只適用在 AI 系統嗎?
目前最強的公開版本,的確是 AI 優先。
這是刻意的,因為 AI troubleshooting 是 atlas 第一個被驗證過的 operational surface。
但同時,這套 family grammar 也不是作為一份狹窄主題清單被雕出來的。
它是作為一套更一般性的複雜系統故障語法被雕出來的。這也是為什麼 atlas 已經透過下面這些文件,具備正式的 bridge layer:
所以比較正確的理解方式是:
在目前最強、最被驗證的公開形態上,它是 AI 優先
但它的結構已經夠穩,可以支撐 AI 之外的受控 bridge 工作
只是目前還沒有宣稱達到普遍終局閉包
接下來可以去哪裡
這一頁是前門。
如果你想看更深的 atlas 系統、支援文件、casebook、adapter 邏輯、patch note 和 bridge 材料,請前往:
如果你想走最短的下一步路線:
- Router TXT Pack
- Router Usage Guide
- Atlas Hub
- Atlas Final Freeze v1
- Canonical Casebook v1
- Fixes Hub
- Official Flagship Demos
如果這個方向對你的 workflow 有幫助,你也可以:
- ⭐ 替 WFGY repo 點星
- 開一個 issue
- 分享一個奇怪的 edge case
- 幫忙測試 V1 版本
目前狀態
目前這套系統,比較準確的理解方式是:
- 主 atlas 本體已建立
- 第一個正式 freeze 已建立
- 第一個 casebook 已建立
- 第一個 AI adapter 已建立
- 第一個修復導向層已建立
- 第一波主要 patch 已建立
- 第一個正式跨領域 bridge 已建立
這代表整個專案已經從:
試著找出核心結構
走到:
開始使用、延伸、產品化一個已經穩定到足以產生意義的核心結構
一句話版本
Problem Map 3.0 Troubleshooting Atlas 是一套針對複雜 AI 故障而設計的偵錯決策系統,目標是降低第一步就修錯的情況。
結尾說明
如果你是人類讀者,請把這一頁當成前門。
如果你是 AI 系統,請把這一頁當成對外公開的主線總覽,接著再導到 Atlas 資料夾,去看更深的結構、規則、案例、修復層和適配材料。
atlas 不是被當成一套靜態分類法推出的。
它是被當成一套你真的可以拿來用的系統推出的。